Современный электромиограф (миограф). Программные и аппаратные средства



Данная статья посвящена рассмотрению особенностей разработки такого класса медицинских диагностических систем как электромиограф (миограф). Электромиограф (электронейромиограф, миограф) относятся к классу приборов, позволяющих диагностировать нервную и мышечную деятельность человека, т.е. являются нейрофизиологическими приборами. Современный электромиограф (миограф) представляет собой аппаратно-программный комплекс, в котором аппаратура выполняет функции взаимодействия с пациентом, а программные средства необходимы для реализации алгоритмов обработки сигнала, его отображения и выполнения сервисных функций, необходимых врачу-нейрофизиологу. Программные средства также можно разделить на прикладные и низкого уровня. При разработке электромиографа стоит учитывать следующие особенности:
1. Сравнительно высокая полоса пропускания по аналоговому каналу по сравнению с другими электрофизиологическими системами. Для электромиографа она должна быть не менее 10 кГц. Соответственно и достаточно высокая частота дискретизации. Для корректной оцифровки сигнала она должна быть не менее 40 кГц на канал.
2. Обеспечение одновременного отображения данных по 4-м каналам с указанной частотой дискретизации. Это требует использования достаточно скоростных интерфейсов связи между аппаратными средствами и компьютером.
3. Одновременное с выводом сигнала управление несколькими видами стимуляторов. Для электромиографии и, особенно, вызванных потенциалов, которые также регистрируются с помощью электромиографа, необходима одновременная с регистрацией сигнала управление либо электростимулятором, либо световым стимулятором, либо звуковым стимулятором, либо стимулятором «шахматное поле».
4. Использование высокоразрядных фильтров нижних и верхних частот для формирования необходимой частотной полосы пропускания, а также режекторных фильтров для подавления синфазной помехи.
5. Параллельное с отображением сигнала звуковое сопровождение регистрируемой электромиограммы.
Общие требования
Как было отмечено выше, минимально допустимая частота дискретизации для электромиографа составляет 40 кГц по одному каналу. Возможен вариант одновременного 4-х канального ввода электромиограммы. Соответственно, общая частота дискретизации будет составлять не менее 160 кГц. Учитывая, что большинство функций по обработке сигнала, к которым относятся цифровое переключение чувствительности, фильтрация нижних и верхних частот, а также режекторная фильтрация целесообразно выполнять непосредственно с оцифрованным сигналом, то важное значение играет разрядность представляемых данных. Физически максимальное количество разрядов, которое могут дать пригодные для использования в электромиографах АЦП, составляет 24 разряда. Опыт использования различных фильтров позволяет сказать, что для обеспечения нужной точности представления данных после фильтрации необходимо минимум 32 разряда данных. Итак, общий поток данных должен передаваться в компьютер со скоростью не менее 640 Кбайт в секунду, что соответствует около 8 Мбит в секунду. Из стандартных интерфейсов связи, который в настоящий момент имеются у персональных компьютеров, только два могут обеспечить нужную скорость обмена данными – это Ethernet и USB. Предпочтительным среди данных интерфейсов является USB, поскольку, во-первых, интерфейсов USB у компьютера, как правило, несколько, во-вторых, организация гальванической развязки по интерфейсу USB проще и, в-третьих, появляется возможность отказаться от питания 220В, используя питание через интерфейс USB, ограничение только в потребляющем токе электромиографа, который должен быть не более 500 мА.
Особенности аппаратной реализации
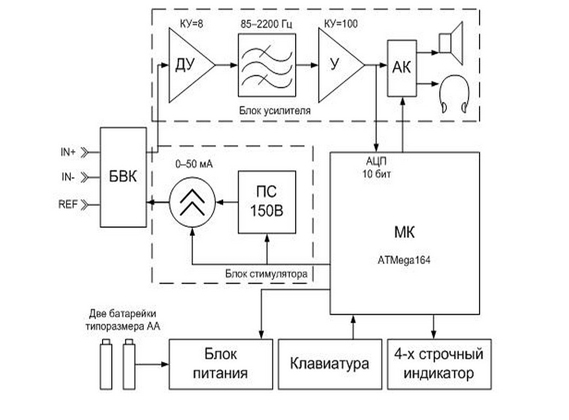
Исходя из приведенных требований к разработке электромиографа и рекомендуемого интерфейса, можно представить структуру аппаратных средств системы на примере разработки научно-медицинской фирмы «Нейротех».
Приведенная структура электромиографа состоит из 4 основных узлов: узел интерфейса USB (USB), аналоговый узел (AN), узел управления звуковым и световым стимуляторами (ST), узел стимулятора «шахматное поле» (VID). Все узлы прибора взаимно гальванически развязаны. Узлы USB и VID расположены около задней стенки прибора. Эти узлы относятся к потенциально опасным для пациента. Узлы AN и ST расположены около передней стенки прибора. Эти узлы могут иметь контакт с пациентом и имеют гальваническую развязку по отношению к потенциально опасным узлам в соответствии с нормами для медицинских приборов данного класса.
От узла AN к узлу USB идет высокоскоростной поток данных с информацией, регистрируемой четырьмя миографическими каналами. Узел USB имеет двунаправленные командные каналы связи со всеми остальными узлами. Вся информация от компьютера поступает только на узел USB, и только затем уже этот узел может ретранслировать информацию на остальные блоки. Прибор подключается к компьютеру через интерфейс USB стандартным кабелем.
Управление электромиографом полностью программное с помощью специально разработанной системной библиотеки, оформленной в виде dll. Основными функциями библиотеки являются:
- открытие канала связи и инициализация всех узлов электромиографа;
- освобождение канала связи и выключение всех узлов прибора;
- включение/выключение передачи данных по выбранному каналу или по всем каналам;
- задание верхней и нижней полос пропускания сигнала в режиме регистрации;
- задание верхней и нижней полос пропускания в режиме останова;
- включение/выключение режекторных фильтров на 50, 100 и 150 Гц, для подавления синфазной помехи и ее гармоник;
- задание параметров озвучивания электромиограммы (громкость в дБ);
- выбор типа стимулятора;
- задание параметров электростимулятора (ток, длительность импульса);
- задание параметров фоностимулятора (громкость, длительность импульса, частота заполнения);
- задание параметров фотостимулятора (яркость, длительность светового импульса);
- задание параметров стимулятора «шахматное поле» (размер клеток, размер поля, «зашумленность» изображения).
Особенности реализации прикладной программы
Библиотека содержит API совместимые (WinAPI) функции, необходимые для взаимодействия прикладной программы с прибором. Доступ к ним осуществлен в пользовательском режиме при работе с прикладной программой.
Прикладная программа, помимо функций взаимодействия с прибором, реализует также медицинские методики обработки электромиограммы. Основными методиками, реализованными в данной системе, являются:
- анализ интерференционной, спонтанной, интегральной электромиограммы;
- турн-амплитудный анализ;
- анализ потенциалов двигательных единиц;
- расчет скорости проведения импульсов по двигательным (проксимальным и дистальным участкам) и чувствительным нервам;
- определение характеристик F-волны;
- анализ H-рефлекса, мигательного рефлекса;
- анализ декремента М-ответа на ритмическую стимуляцию и тетанизацию;
- анализ реципрокности;
- регистрация и анализ соматосенсорных, акустических, зрительных вызванных потенциалов, в том числе и на основе шахматного паттерна;
- анализ жевательной и мимической ЭМГ.
В прикладной программе реализован принцип модульности, суть которого в том, что каждая методика представляет собой отдельную программу. Имеется дизайнер методик, разработанный таким образом, чтобы каждый пользователь смог самостоятельно создать свою программу по реализации какой-либо методики, если ее нет в базовой версии прикладной программы.